Количество страниц – 16 стр.
Уникальность – 60 - 70 %, дата проверки - май 2018
Дополнительная информация – титульного лист нет.
Год – неизвестно
Задание и исходные данные. 3
Определение передаточных функций системы.. 5
Исследование устойчивости САУ. 8
Критерий Гурвица. 8
Критерий Рауса. 9
Критерий Найквиста. 9
Критерий Михайлова. 11
Область Д-разбиения в плоскости варьируемого параметра. 11
Расчет переходного процесса системы и определение ее динамических показателей. 13
Список используемой литературы: 15
Функциональная схема автоматической системы управления положением руки робота-манипулятора в одной проекции представлена на Рисунке:
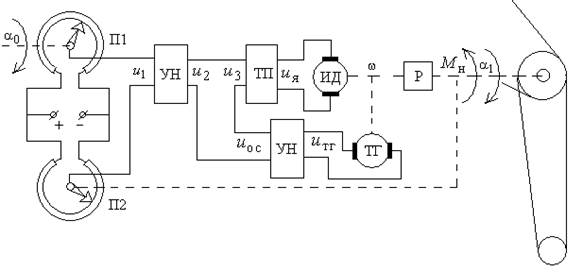
Названия и параметры узлов системы:
Потенциометрический датчик П1: kП1 = 1,8 В/рад;
Потенциометрический датчик П2: kП2 = 1,8 В/рад;
Усилитель напряжения прямой цепи: kун1 = 14;
Усилитель напряжения цепи ОС по скорости: kун2 = 5;
Тиристорный преобразователь: kтп = 22; TТП = 0,01 с;
ДПТ: kДПТ_u =15 рад/(В·с);
kДПТ_м = 2,5 рад/(Н·м·с); Tм =0,11с; Tя = 0,03с;
Тахогенератор: kТГ = 0,2 B·с
Редуктор: kp = 0,01 .
Отчёт