1. ЦЕЛИ И ЗАДАЧИ ВЫПОЛНЕНИЯ КОНТРОЛЬНО - КУРСОВОЙ РАБОТЫ
Выполнение контрольно-курсовой работы (ККР) представляет собой завершающий этап изучения курса «Дополнительные главы математики».
Задачами ККР являются:
- закрепление и обобщение знаний, полученных студентами в процессе обучения;
- развитие навыков применения теоретических положений при решении практических инженерных задач по специальности;
- развитие навыков расчета, умение пользоваться технической и справочной литературой, ГОСТами;
- формирование инженерного мышления, подготовка к дипломному проектированию:
- развитие навыков в работах исследовательского характера;
- развитие навыков в работе с современными компьютерными технологиями.
2. ОСНОВНЫЕ ТРЕБОВАНИЯ К КОНТРОЛЬНО-КУРСОВОЙ РАБОТЕ
2.1 Тематика контрольно-курсовой работы
Темой задания ККР является нахождение линейных динамических моделей объектов управления по данным наблюдений за входом и выходом объекта, в частности, по разгонным характеристикам объектов и корреляционным функциям входо-выходных сигналов.
2.2 Исходные данные к контрольно-курсовой работе
Исходные данные к ККР выдаются преподавателем в виде номера варианта и приводятся в специальном разделе расчетно-пояснительной записки. В этом разделе указывается тема работы, номер варианта, данные разгонной характеристики и параметры корреляционных функций.
2.3 Объем контрольно-курсовой работы
Работа представляется к защите в виде расчетно-пояснительной записки объемом 10-15 листов формата 297×210 мм (ГОСТ 2.301-68). В записке приводятся все необходимые графические материалы на отдельных листах или миллиметровке. На отдельный графический лист можно вынести разгонную характеристику объекта с указанием на ней всех характерных точек, необходимых для поиска модели различными методами, а также автокорреляционную и взаимную корреляционную функции.
2.4 Выполнение контрольно-курсовой работы
График выполнения ККР доводится до студентов преподавателем и приводится в задании. На выполнение и защиту ККР отводится восемь недель. Контрольно-курсовая работа начинается с анализа задания и изучения настоящих указаний. В процессе работы студент пользуется консультациями и должен являться к руководителю на практические занятия. За неделю до срока окончания работы кафедра составляет, утверждает и доводит до сведения студентов график защиты ККР. За 3-4 дня до защиты студент представляет руководителю полностью оформленную пояснительную записку на проверку. Руководитель дает письменное заключение о качестве выполненной работы (рецензию), определяет возможность допуска студента, выполнявшего работу, к защите.
2.5 Защита контрольно-курсовой работы
При подготовке к защите студент анализирует заключение руководителя, вносит необходимые исправления и представляет повторно пояснительную записку на проверку с обязательным приложением предыдущей рецензии руководителя. Защита работы проводится перед комиссией в составе руководителя и членов комиссии, утвержденных решением кафедры. В докладе должна быть сформулирована задача, поставленная руководителем, освещены пути и методы ее решения, сравнение с существующими способами расчета, доказаны эффективность использования предлагаемых методов и моделей.
3. МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ КОНТРОЛЬНО-КУРСОВОЙ РАБОТЫ
3.1 Содержание разделов пояснительной записки
Пояснительная записка к ККР должна содержать:
1. титульный лист;
2. задание на ККР;
3. содержание;
4. общетеоретическую часть;
5. расчетную часть;
6. заключение;
7. список используемых источников;
8. приложения.
3.2. Методические указания к выполнению отдельных разделов контрольно-курсовой работы
3.2.1. Титульный лист
Титульный лист выполняется по форме, приведенной в методических указаниях по оформлению технической документации, действующих на момент выполнения работы на кафедре.
3.2.2. Общетеоретическая часть
Должна содержать информацию о целях и задачах идентификации объектов управления, характеризовать типовые методы идентификации, содержать их сравнение.
3.2.3. Расчетная часть
Определение модели объекта по разгонной характеристике
В настоящее время при расчете настроек регуляторов локальных систем широко используются достаточно простые динамические модели промышленных объектов управления. В частности, использование моделей инерционных звеньев первого или второго порядка с запаздыванием для расчета настроек регуляторов обеспечивает в большинстве случаев достаточно качественную работу реальной системы управления.
В связи с этим одной из задач ККР является определения численных значений параметров динамических моделей по кривой разгона объекта управления.
В зависимости от вида переходной характеристики (кривой разгона) задаются чаще всего одним из двух видов передаточной функции объекта управления:
- в виде передаточной функции инерционного звена первого порядка с запаздыванием
 , (3.1)
, (3.1)
где ![]() - коэффициент усиления, постоянная времени и время запаздывания, которые должны быть определены в окрестности номинального режима работы объекта.
- коэффициент усиления, постоянная времени и время запаздывания, которые должны быть определены в окрестности номинального режима работы объекта.
- в виде звена второго порядка с запаздыванием
 . (3.2)
. (3.2)
Перед началом обработки кривую разгона рекомендуется пронормировать (диапазон изменения нормированной кривой должен быть 0 - 1) и выделить из ее начального участка величину чистого временного запаздывания.
Динамический коэффициент усиления ![]() объекта определяется как отношение приращения выходного сигнала к приращению входного в окрестности рабочей точки. В нашем случае для всех вариантов заданий он очевидно равен единице.
объекта определяется как отношение приращения выходного сигнала к приращению входного в окрестности рабочей точки. В нашем случае для всех вариантов заданий он очевидно равен единице.
Пример. Дана нормированная кривая разгона объекта, у которой заранее выделена величина чистого запаздывания ![]() . Построим по ее значениям, приведенным в табл. 3.1, график кривой разгона, показанный на рис. 3.1.
. Построим по ее значениям, приведенным в табл. 3.1, график кривой разгона, показанный на рис. 3.1.
Таблица 3.1.
|
|
0 |
2 |
4 |
6 |
8 |
10 |
12 |
14 |
18 |
22 |
|
|
0 |
0,087 |
0,255 |
0,43 |
0,58 |
0,7 |
0,78 |
0,84 |
0,92 |
0,96 |
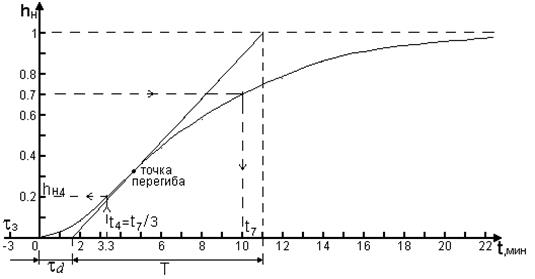
Рис. 3.1. График кривой разгона
Определение динамических характеристик объектов первого порядка с запаздываниеем по кривой разгона можно производить двумя методами.
1) Метод касательной к точке перегиба кривой разгона.
В данном случае точка перегиба соответствует переходу кривой от режима ускорения к режиму замедления темпа нарастания выходного сигнала. Постоянная времени Т и динамическое запаздывание ![]() определяются в соответствии с графиком, показанным на рис. 3.1, тогда
определяются в соответствии с графиком, показанным на рис. 3.1, тогда ![]() .
.
2) Формульный метод позволяет аналитически вычислить величину динамического запаздывания и постоянной времени по формулам
 ,
,  , (3.3)
, (3.3)
где значение ![]() ,берется в окрестности точки перегиба кривой, а значение
,берется в окрестности точки перегиба кривой, а значение ![]() принимается равным 0,8. По этим значениям определяются моменты времени
принимается равным 0,8. По этим значениям определяются моменты времени ![]() и
и ![]() .
.
Метод Орманса позволяет по нормированной кривой разгона определить две доминирующие постоянные времени объекта управления для модели.
Методика поясняется с использованием предыдущей кривой разгона, приведенной на рис. 3.1. Для этого по нормированной кривой разгона определяется время, соответствующее значению ![]() и обозначается
и обозначается ![]() . Полученный интервал делится на три части. Поднимается перпендикуляр до кривой разгона и определяется величина
. Полученный интервал делится на три части. Поднимается перпендикуляр до кривой разгона и определяется величина ![]() . Аналитически доказана связь между точками кривой разгона и параметрами модели, а именно
. Аналитически доказана связь между точками кривой разгона и параметрами модели, а именно ![]()
Постоянные времени объекта управления ![]() и
и ![]() определяются с помощью вспомогательной величины
определяются с помощью вспомогательной величины ![]() , для нахождения которой используется номограмма, приведенная на рис. 3.2.
, для нахождения которой используется номограмма, приведенная на рис. 3.2.
Рис. 3.2. Номограмма для определения величины ![]()
Постоянные времени объекта управления ![]() и
и ![]() определяются по следующим формулам:
определяются по следующим формулам:
![]() (3.4)
(3.4)
Если ![]() , то для определения динамики объекта используют метод площадей.
, то для определения динамики объекта используют метод площадей.
Типовые табличные методы корреляционной идентификации
Как известно корреляционные методы идентификации основаны на решении интегрального уравнения Винера–Хопфа
![]() . (3.5)
. (3.5)
Одним из самых простых и эффективных способов решения этого уравнения является табличный метод типовой идентификации, разработанный под руководством проф. Райбмана Н. С. [3]. Идея метода чрезвычайно проста: были заданы несколько типичных автокорреляционных функций входных сигналов объекта Ruu(t), работающего в нормальном режиме, и по ним, последовательно задаваясь различными характеристиками типовых динамических объектов, а именно дифференциальными уравнениями до 3-го порядка включительно, были построены соответствующие взаимно корреляционные функции входного и выходного сигналов. Таким образом, была получена достаточно обширная таблица соответствия между корреляционными функциями Ruu(t), Ryn(t) и моделями объектов, заданными в виде дифференциальных уравнений с известными параметрами, охватывающими достаточно обширный класс реальных объектов, названных типовыми [3].
В результате, процесс идентификации сводится, по существу, к нахождению оценок корреляционных функций ![]() и
и ![]() по экспериментально полученным входо-выходным выборкам и правильному использованию имеющейся таблицы. Аппроксимация экспериментально полученных оценок
по экспериментально полученным входо-выходным выборкам и правильному использованию имеющейся таблицы. Аппроксимация экспериментально полученных оценок ![]() и
и![]() табличными функциями будет приводить к некоторой погрешности в определении модели объекта, однако во многих практических случаях эта погрешность оказывается вполне приемлемой особенно с учётом минимальности затрат усилий и времени при такой идентификации.
табличными функциями будет приводить к некоторой погрешности в определении модели объекта, однако во многих практических случаях эта погрешность оказывается вполне приемлемой особенно с учётом минимальности затрат усилий и времени при такой идентификации.
Правила использования таблиц типовой идентификации
1. Таблицы построены для трёх основных типов автокорреляционных функций входного сигнала:
1). ![]() (графики 2-х подтипов приведены на рис. 3.1.1 и 3.1.7 в книге [3]);
(графики 2-х подтипов приведены на рис. 3.1.1 и 3.1.7 в книге [3]);
2). ![]() (рис. 3.3.1 и 3.3.21 в книге [3]);
(рис. 3.3.1 и 3.3.21 в книге [3]);
![]() (рис. 3.5.1 в книге [3]).
(рис. 3.5.1 в книге [3]).
Поэтому сначала по внешнему виду экспериментально полученной оценки автокорреляционной функции ![]() выбираются соответствующие таблицы. Например, если
выбираются соответствующие таблицы. Например, если ![]() по внешнему виду похожа на автокорреляционную функцию первого типа, то выбираются таблицы 3.1 и 3.2, если второго, то 3.3 и 3.4, если третьего, то 3.5 и 3.6 согласно книге [3].
по внешнему виду похожа на автокорреляционную функцию первого типа, то выбираются таблицы 3.1 и 3.2, если второго, то 3.3 и 3.4, если третьего, то 3.5 и 3.6 согласно книге [3].
2. Далее по выбранной из соответствующей таблицы ![]() и экспериментальной
и экспериментальной ![]() автокорреляционным функциям определяется масштабный коэффициент k по оси времени, получаемый из соотношения
автокорреляционным функциям определяется масштабный коэффициент k по оси времени, получаемый из соотношения ![]() , где с – масштабный коэффициент по оси ординат.
, где с – масштабный коэффициент по оси ординат.
3. Строится промежуточная взаимно корреляционная функция выходной и входной переменных по экспериментально полученной взаимно корреляционной функции согласно:
![]() . (3.6)
. (3.6)
4. Для облегчения поиска табличной взаимно корреляционной функции, наиболее близкой по форме к ![]() , таблица в книге [3] всех возможных взаимно корреляционных функций разбита на группы похожих по форме кривых и построена специальная таблица типичных групповых взаимно корреляционных функций. По этой таблице сначала определяется номер наиболее близкой по форме группы функций, и затем поиск кривой ведётся в уже выбранной группе. В результате, достаточно быстро и просто оказывается выбрана табличная взаимно корреляционная функция
, таблица в книге [3] всех возможных взаимно корреляционных функций разбита на группы похожих по форме кривых и построена специальная таблица типичных групповых взаимно корреляционных функций. По этой таблице сначала определяется номер наиболее близкой по форме группы функций, и затем поиск кривой ведётся в уже выбранной группе. В результате, достаточно быстро и просто оказывается выбрана табличная взаимно корреляционная функция ![]() , наиболее близкая по форме к
, наиболее близкая по форме к ![]() , а по ней уже определяется табличное дифференциальное уравнение с известными табличными коэффициентами, например, третьего порядка
, а по ней уже определяется табличное дифференциальное уравнение с известными табличными коэффициентами, например, третьего порядка
![]() . (3.7)
. (3.7)
5. Вычисляется масштабный коэффициент k3 по формуле:
 . (3.8)
. (3.8)
6. Коэффициенты дифференциального уравнения, найденные по таблице в пункте 4, для учета разницы масштабов корреляционных функций пересчитываются по формулам:
3-й порядок: ![]()
![]()
2-й порядок: ![]()
![]()
1-й порядок: ![]()
![]()
Пример решения задачи:
Необходимо определить оператор цементной мельницы Серебряковского цементного завода (размер мельницы 2,6х13 м). В качестве входного сигнала цементной мельницы рассматривается положение ножа тарельчатого питателя клинкером - ![]() ; в качестве выходного сигнала – тонкость помола -
; в качестве выходного сигнала – тонкость помола - ![]() . Заданы автокорреляционная и взаимно корреляционная функции входного и выходного сигналов, вычисленные по их экспериментально снятым реализациям, показанные на рис. 3.3.
. Заданы автокорреляционная и взаимно корреляционная функции входного и выходного сигналов, вычисленные по их экспериментально снятым реализациям, показанные на рис. 3.3.
Определим оператор данного объекта по изложенному выше алгоритму с использованием таблиц из книги [3].
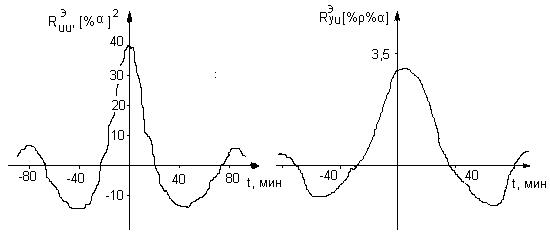
Рис. 3.3.
1. Для кривой ![]() из таблиц в книге [3] определяем наиболее близкую к ней по форме автокорреляционную функцию (рис. 3.3.21 [3]), аналитически выражаемую следующим образом:
из таблиц в книге [3] определяем наиболее близкую к ней по форме автокорреляционную функцию (рис. 3.3.21 [3]), аналитически выражаемую следующим образом:
![]() .
.
2. Определяем масштабный коэффициент k:
![]() с/мин,
с/мин,
где ![]() и
и ![]() - отрезки оси времени на графиках кривых
- отрезки оси времени на графиках кривых ![]() и
и ![]() соответственно от нуля до первого пересечения кривыми оси времени.
соответственно от нуля до первого пересечения кривыми оси времени.
3. Строим промежуточную кривую
![]() .
.
Отметим, что по внешнему виду она будет совпадать с кривой ![]() , однако будет иметь другие масштабы по осям абсцисс и ординат.
, однако будет иметь другие масштабы по осям абсцисс и ординат.
4. По таблицам 3.3 и 3.4 из книги [3] определяется ![]() , как табличная взаимно корреляционная функция, наиболее близкая по форме к кривой
, как табличная взаимно корреляционная функция, наиболее близкая по форме к кривой ![]() (или
(или ![]() ). В данном примере это будет кривая, изображенная на рис. 3.4.6 в книге [3], соответствующая объекту первого порядка с коэффициентами:
). В данном примере это будет кривая, изображенная на рис. 3.4.6 в книге [3], соответствующая объекту первого порядка с коэффициентами: ![]() с-1;
с-1; ![]() с-1.
с-1.
5. Вычислим масштабный коэффициент
 .
.
6. Пересчитаем коэффициенты дифференциального уравнения
![]() ;
;
![]() .
.
Таким образом, окончательно идентифицированный объект описывается дифференциальным уравнением
![]()
или передаточной функцией
 .
.
3.2.4. Заключение
Должно содержать основные выводы по работе.
4. МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ПРОВЕДЕНИЮ ИНДИВИДУАЛЬНОЙ РАБОТЫ
На выполнение ККР отводится 5 часов самостоятельных занятий студентов. Тематика занятий должна соответствовать ходу выполнения работы. Целью занятий является закрепление теоретического материала, приобретение практических навыков в расчете параметров линейных динамических моделей объектов управления, обеспечивающих своевременное выполнение ККР. Самостоятельные занятия студентов сопровождаются индивидуальными консультациями преподавателя.
Проведение индивидуальных консультаций начинается с анализа темы ККР, уяснения общих задач, стоящих перед студентами, уточнения отдельных практических вопросов. Однако, в любом случае основную часть ККР должна составлять самостоятельная работа студентов при активном участии в этом процессе руководителя.
Библиографический список рекомендуемой литературы
1. Кочетыгов А. А. Методы идентификации: Учеб. пособие. – Тула: Изд-во ТулГУ, 2001. – 220 с.
2. Гроп Д. Методы идентификации систем. - М.: Мир, 1979. - 302 с.
3. Типовые линейные модели объектов управления / Под ред. Н. С. Райбмана. - М.: Энергоатомиздат, 1983. - 264 с.
4. Лившиц К. И. Идентификация: Учеб. пособие. - Томск: Изд-во ТГУ, 1981. - 132 с.
5. Льюнг Л. Идентификация систем. Теория для пользователя. - М.: Наука, 1991. - 432 с.
6. Эйкхофф П. Основы идентификации систем управления. Оценивание параметров и состояния. - М.: Мир, 1975. - 686 с.
7. Ройтенберг Я. Н. Автоматическое управление: Учеб. Пособие. – М.: Наука, 1992. – 576 с.
8. Коновалов В. И. Идентификация объектов управления: Учеб. пособие. - Томск: Изд-во ТПУ, 1981. - 90 с.
9. Кухаренко Н. В. Математические модели объектов управления и их статистическая идентификация: Учеб. пособие. – Л.: 1982. – 87 с.
10. Методы классической и современной теории автоматического управления: Учебник в 3-х т. Т.1: Анализ и статистическая динамика систем автоматического управления / Под ред. Н. Д. Егупова. - М.: Изд-во МГТУ им. Н. Э. Баумана, 2000. – 748 с.
Скачать полный текст - Дополнительные главы математики.zip
Отчёт